B型微型四旋翼项目于2014年7月参加庆科首届智能硬件创新设计大赛后搁置。
目前概况
 微型四旋翼与AndroPilot地面站
微型四旋翼与AndroPilot地面站
完成度
- 俯仰、滚转保持,航向阻尼
- 与地面站通信,接受姿态角、航向角速率和油门指令并传回姿态(不包括航向角)、IMU测量值、电池电压等信息
实现方案
- 720直流空心杯电机作为动力,3.7V 250mAh至400mAh锂聚合物电池提供能源
- 旋翼直径46mm,相邻旋翼中心距60mm
- 机身由板材、尼龙柱和小电动直升机尾桨座拼接、粘合而成
- STM32F103C8主控制器,MPU6000加速度计/速率陀螺,通信模块为济南华茂科技有限公司HM-02、HM-06蓝牙模块或者上海庆科信息技术有限公司EMW3161 WiFi模块。
- 主控制器中运行FreeRTOS 8.0.2操作系统,与地面站通信的应用层协议是MAVlink,地面站软件是QGroundControl
- 控制器是双环PID,传感器融合算法来自Madgwick的研究报告
- 根据推导出的飞行动力学模型,飞行器质心被设计得尽量靠近旋翼平面,这样可以使模型变得简单,也许便于PID调参
实现细节
飞行动力学模型
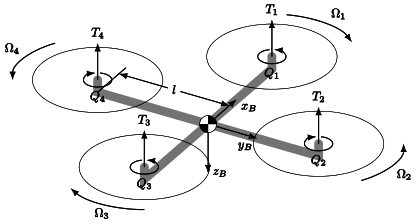 微型四旋翼中各物理量的示意,其中
微型四旋翼中各物理量的示意,其中 指向机头,
指向机头, 是旋翼
是旋翼 产生的升力,
产生的升力, 是旋翼 产生的扭矩,
是旋翼 产生的扭矩, 是旋翼 的转速。
是旋翼 的转速。
定义:
 ,
, ,
, 分别是俯仰、滚转、航向角
分别是俯仰、滚转、航向角 ,
, ,
, 分别是滚转、俯仰、偏航角速率,即沿 ,
分别是滚转、俯仰、偏航角速率,即沿 , ,
, 的角速率
的角速率 ,
, ,
, 分别是质心在导航系
分别是质心在导航系 轴中的速度分量
轴中的速度分量 是旋翼平面相对于飞行器质心的位置,高于质心为正
是旋翼平面相对于飞行器质心的位置,高于质心为正 是机体沿
是机体沿 轴的惯性矩(机体有对称性,故
轴的惯性矩(机体有对称性,故 为惯性主轴),
为惯性主轴), 是旋翼沿转轴的惯性矩
是旋翼沿转轴的惯性矩 是各个旋翼转速变化量的线性组合
是各个旋翼转速变化量的线性组合 ,
, 是与旋翼形状和转速有关的参数
是与旋翼形状和转速有关的参数
定义悬停状态为

那么在悬停状态附近线性化的状态空间方程为




姿态测量
控制器
硬件
软件
地面站通信
惯性传感器误差标定
PID参数
历史版本



